February 27, 2024
Dezibot Arena – Swarm intelligence from Dezibots: Demonstrator
Living Lab
Imagine a city that has been hit by a strong earthquake. The buildings are in ruins, the internet is down and more aftershocks have been announced. Recovery work should start immediately, but it is still dangerous for people to be on site. This is where robots or drones could come into play, sent into the city to rescue survivors as quickly as possible without having to rely on a functioning internet network. In the Dezibot Arena, it is possible to simulate how robots can communicate with each other without this network.
Ants as role models for Dezibots
The project “Swarm Intelligence from Dezibots” developed at ScaDS.AI Dresden/Leipzig has researched and recreated the behavior of ants. Ants can communicate within a limited area by leaving information in their surroundings. The information left are pheromones which are released and allow ants to create trails so that other ants can follow them and ant trails are formed. This is how they solve challenges such as foraging, nest building or defense against enemies.
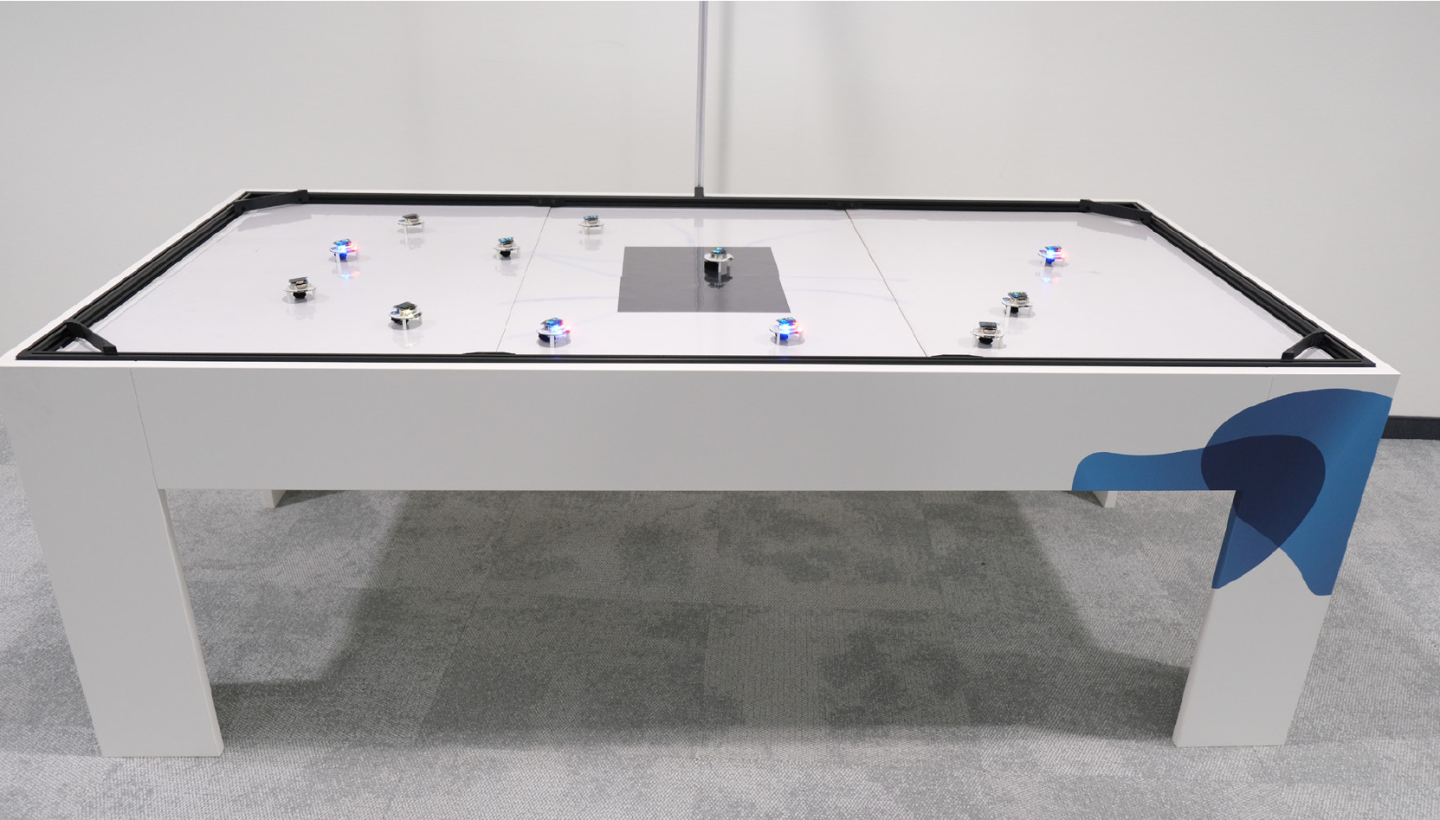

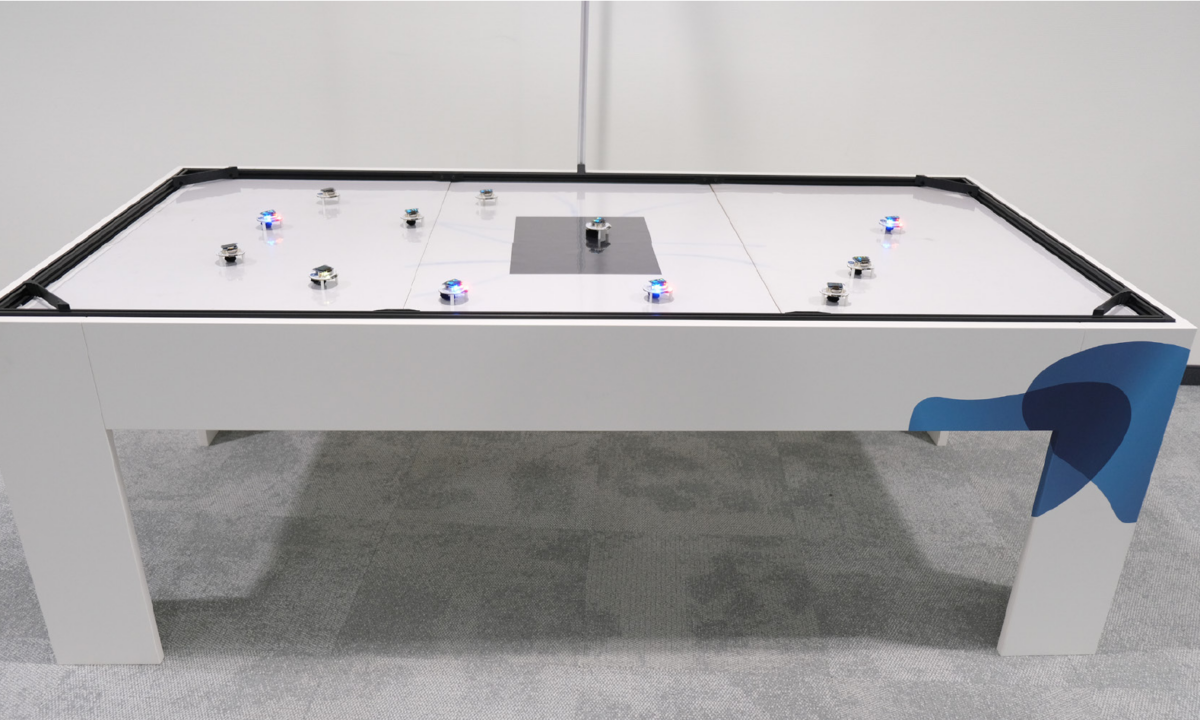
The dezibot arena recreated this behavior with small robots. For this purpose, a photoswitch surface was installed, which carries a specific molecule that turns blue as soon as it comes into contact with UV radiation. The small robots carry a UV LED on their lower side to leave their trail (the pheromone in the case of the ants) and color the photoswitch surface blue. They also carry a light sensor to measure whether the light coming from below is bright or dark (to smell in the case of the ants). The robots are given algorithms to reproduce the ants‘ behavior, whereby very simple instructions are sufficient to reproduce this. In this way, swarm behavior can be illustrated.
An interactive version of the robot arena is currently under development.
The first implementations of these findings can already be found in the automotive industry with the emerging autonomous cars, where cars or traffic lights can communicate in a zone without a network. However, it also offers great potential for research in the deep sea or for space travel.




funded by:

ScaDS.AI Dresden/Leipzig (Center for Scalable Data Analytics and Artificial Intelligence) is a center for Data Science, Artificial Intelligence and Big Data with locations in Dresden and Leipzig.
Dresden
Visitor address
Technische Universität Dresden
ScaDS.AI Dresden/Leipzig
Bürogebäude Strehlener Straße
Strehlener Straße 12, 14
01069 Dresden
ScaDS.AI Dresden/Leipzig
Bürogebäude Strehlener Straße
Strehlener Straße 12, 14
01069 Dresden
Postal address
Technische Universität Dresden
Zentrum für Informationsdienste und Hochleistungsrechnen
ScaDS.AI Dresden/Leipzig
01062 Dresden
Zentrum für Informationsdienste und Hochleistungsrechnen
ScaDS.AI Dresden/Leipzig
01062 Dresden
Leipzig
Visitor address
ScaDS.AI Dresden/Leipzig
Löhrs Carré
Humboldtstraße 25, Uferstr. 11
04105 Leipzig
Löhrs Carré
Humboldtstraße 25, Uferstr. 11
04105 Leipzig
Postal address
Universität Leipzig
Data Science Center ScaDS.AI Leipzig
Internes Postfach: 322001
04081 Leipzig
Data Science Center ScaDS.AI Leipzig
Internes Postfach: 322001
04081 Leipzig
Quicklinks:
Copyright 2026 © SCADS.AI Dresden/Leipzig – All rights reserved.
