March 16, 2026
Autonomous Navigation by Microrobots in Complex Flow Patterns
Press Releases and Reports
Researchers at ScaDS.AI Dresden/Leipzig and Leipzig University have achieved a breakthrough in microrobotics. For the first time, they have shown that tiny synthetic microswimmers can perceive their surroundings directly through their own body shape and autonomously adapt to rapidly changing fluid flows. The study, now published in Science Advances, establishes a new paradigm for autonomous microsystems whose control functions reliably in challenging environments where conventional sensors fail. This opens up new prospects for autonomous medical microrobots, for example for the targeted delivery of medication in the bloodstream.
The research team, led by Prof. Dr. Frank Cichos from the Molecular Nanophotonics Group at the Peter Debye Institute for Soft Matter Physics at Leipzig University used reinforcement learning, a machine-learning approach, to control microswimmers navigating through complex flow fields. The microscopic particles learned successful navigation strategies using algorithms, even though they had no direct sensory information about the flows opposing their movement. Because each movement of the particles already carried the signature of the surrounding flow, their bodies themselves served as sensors and thus as the data basis for the algorithm.
Professor Cichos emphasizes the broader significance: “This work bridges biological inspiration with practical implementation. Motile microorganisms have evolved to exploit their physical embodiment for navigation over millions of years. We’re now showing that machine learning can discover similar strategies in synthetic systems within experimentally feasible timescales.”
Physics Becomes a Learning and Decision-Making System for Microrobots
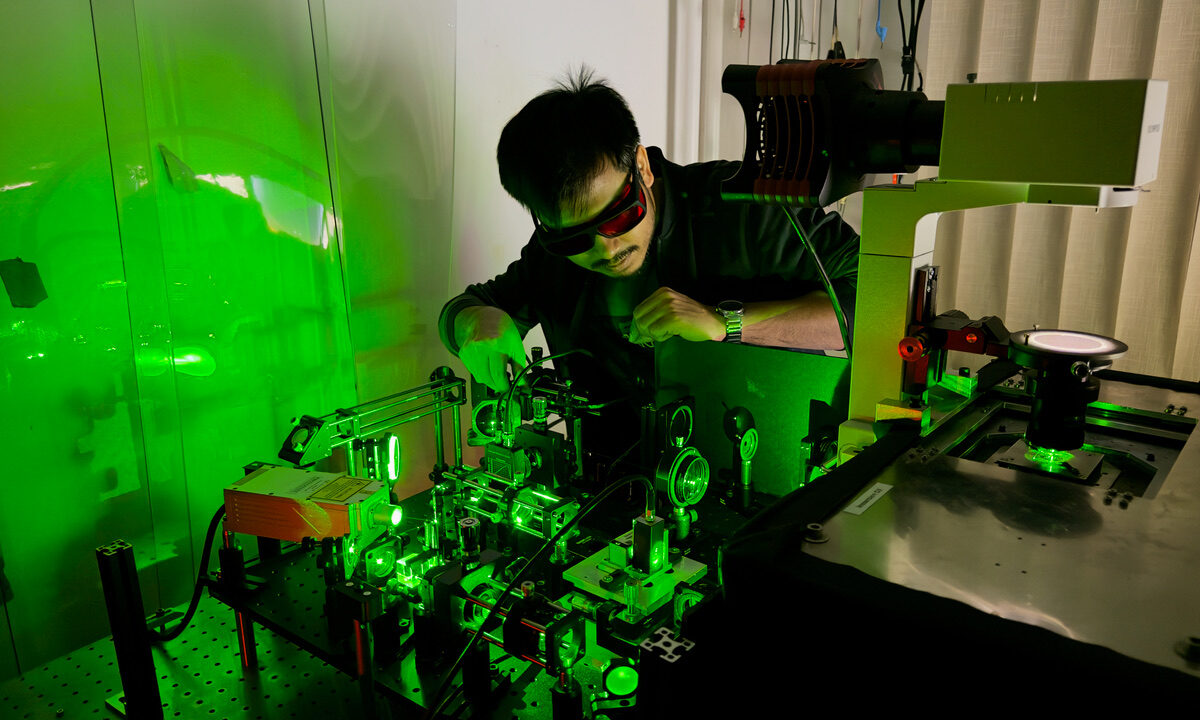
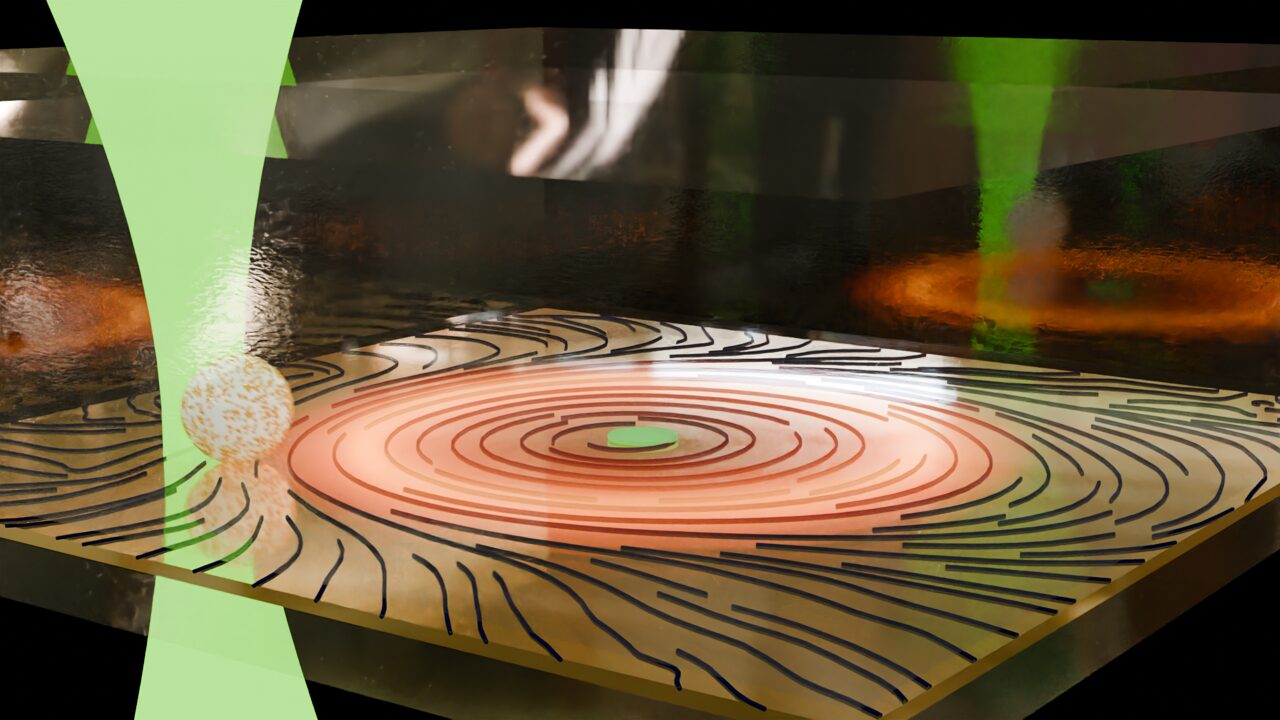
The researchers combine gold nanoparticle-coated melamine particles, so-called synthetic microswimmers (with a radius of around 1 micrometre), with real-time optical control and machine-learning algorithms. The particles are propelled by asymmetric laser heating. During the training phases, the particles learn to reach their destinations despite hydrodynamic disturbances caused by laser-induced flows.
“The experiments themselves were quite challenging,” notes Dr. Diptabrata Paul, a research associate at the Peter Debye Institute. “We had to achieve stable real-time control while simultaneously training the learning algorithm – essentially teaching the microswimmer on-the-fly as it navigates. The particles face flows up to four times stronger than their own propulsion speed, yet they learn successful navigation within roughly 50 training episodes.”
The key insight lies in what researchers call “embodied intelligence” – the principle that physical structures and interactions with the environment can serve as computational resources for algorithms. Rather than relying on miniaturised sensors and processors, the motion dynamics of the microswimmers themselves become information processors.
“This differs fundamentally from our usual conception of robot design,” Paul explains. “Instead of trying to explicitly sense everything via sensors and then calculate responses, the physical interaction between the body and its environment is used to obtain the necessary information. The learning algorithm discovers how this embodied information can be read and responded to.”
Autonomous microrobots without sensors: a new paradigm
This work has significant implications for applications where explicit sensor technology is impractical or impossible. “Think about targeted drug delivery inside the human body,” suggests Dr. Nico Scherf of the Max Planck Institute for Human Cognitive and Brain Sciences. “Traditional approaches rely on pre-programmed responses or external control, but physiological flows are complex and unpredictable. Microrobots that learn from their own dynamics could potentially navigate these environments autonomously.” The research also opens up new avenues for swarm robotics: multiple microrobots could exhibit collective embodied intelligence.
“We’re really just beginning to explore what’s possible when we treat physical embodiment as a computational resource,” Paul summarizes. “This work demonstrates the principle experimentally. The next challenge is scaling these ideas to more complex environments and tasks.”
Research Team
In addition to Dr. Diptrabrata Paul and Prof. Dr. Frank Cichos from Leipzig University, the research team also included Nikola Milosevic and Dr. Nico Scherf from the Max Planck Institute for Human Cognitive and Brain Sciences, who contributed their expertise in the field of machine learning optimization. All researchers are affiliated with the Center for Scalable Data Analytics and Artificial Intelligence Dresden/Leipzig (ScaDS.AI Dresden/Leipzig). The Federal Ministry of Research, Technology, and Space (BMFTR) supported the research as part of the ACONITE project and by the Center for Scalable Data Analytics and Artificial Intelligence (ScaDS.AI) Leipzig.
Original title of the article in Science Advances
“Physical Embodiment Enables Information Processing Beyond Explicit Flow Sensing in Active Matter,” doi: 10.1126/sciadv.aec0783



funded by:

ScaDS.AI Dresden/Leipzig (Center for Scalable Data Analytics and Artificial Intelligence) is a center for Data Science, Artificial Intelligence and Big Data with locations in Dresden and Leipzig.
Dresden
Visitor address
Technische Universität Dresden
ScaDS.AI Dresden/Leipzig
Bürogebäude Strehlener Straße
Strehlener Straße 12, 14
01069 Dresden
ScaDS.AI Dresden/Leipzig
Bürogebäude Strehlener Straße
Strehlener Straße 12, 14
01069 Dresden
Postal address
Technische Universität Dresden
Zentrum für Informationsdienste und Hochleistungsrechnen
ScaDS.AI Dresden/Leipzig
01062 Dresden
Zentrum für Informationsdienste und Hochleistungsrechnen
ScaDS.AI Dresden/Leipzig
01062 Dresden
Leipzig
Visitor address
ScaDS.AI Dresden/Leipzig
Löhrs Carré
Humboldtstraße 25, Uferstr. 11
04105 Leipzig
Löhrs Carré
Humboldtstraße 25, Uferstr. 11
04105 Leipzig
Postal address
Universität Leipzig
Data Science Center ScaDS.AI Leipzig
Internes Postfach: 322001
04081 Leipzig
Data Science Center ScaDS.AI Leipzig
Internes Postfach: 322001
04081 Leipzig
Quicklinks:
Copyright 2026 © SCADS.AI Dresden/Leipzig – All rights reserved.
